即可将网页分享至朋友圈
近日,自动化工程学院博士研究生张鑫昊、硕士研究生张连驰、硕士研究生陈晨、格拉斯哥学院本科生叶玮根等以第一作者身份在机器人领域国际顶级会议2025 IEEE/RSJ International Conference on Intelligent Robots and Systems(2025 IEEE/RSJ IROS)上发表研究性论文三篇。该成果为电子科技大学人机智能技术与系统教育部工程研究中心程洪教授团队完成,由程洪教授、张静婷讲师、邹朝彬副研究员共同指导完成,聚焦人机认知交互、康复脑机接口、康复外骨骼等创新技术领域。
程洪教授团队构建康复脑控外骨骼技术与系统,面向脑卒中运动与认知功能的多模训练与评估应用。团队创新性地提出一种人机认知交互与学习技术,是结合机器人、认知科学和人因工程学的前沿研究技术。该技术可从脑电、肌电、眼动、步态、力等生理和物理信号中学习人类认知行为的动态过程,通过分析人类运动、认知、经验、情绪等因素影响下的行为与生理信号,实现人工智能技术与人类认知、行为模式的深度融合,为理解人类认知过程、优化人机协作提供科学依据与技术支撑。

图1 团队参加杭州举办的2025 IEEE/RSJ IROS会议。从左到右:张连驰、陈晨、张静婷、邹朝彬、宋广奎、蒋子熠、张鑫昊
本科生叶炜根和博士生张鑫昊以共同第一作者发表“Force-Sensor-free Contact Estimation for Lower Limb Exoskeleton Robots Based on Probabilistic Modeling and Fusion” ,通讯作者为邹朝彬副研究员。该成果由张鑫昊在会场以oral报告和poster结合展示(见图2)。该文面向下肢运动康复训练的外骨骼机器人,提出了一种基于概率建模和数据融合的无力传感器接触状态估计方法(见图3),能够有效地在不增加额外硬件的情况下,通过现有的传感器基础设施提供高效的接触状态估计,以克服传统下肢外骨骼中力传感器高成本、易损性及噪声敏感性等局限性,有效提升外骨骼在人机物理交互中的性能与效率。

图2 博士生张鑫昊进行oral报告
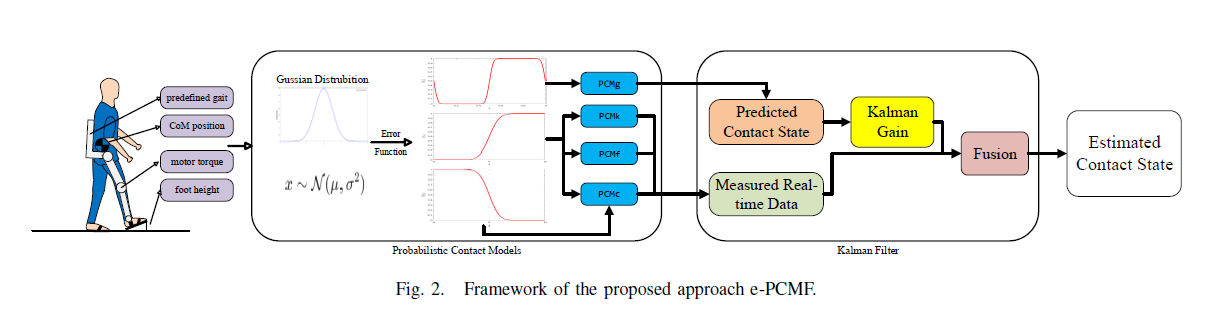
图3 论文一:无力传感器下肢外骨骼机器人接触状态估计方法
硕士研究生张连驰以第一作者发表“Engaging Mind and Body: An Immersive BCI Paradigm with Motion-Panoramic Virtual Reality”,通讯作者为张静婷讲师。该成果由张连驰在会场以oral报告和poster结合展示(见图4)。该文面向认知康复训练的脑机接口与交互系统,提出一种融合新型运动全景虚拟现实系统的感官沉浸式脑机接口决策范式(见图5),可以结合视觉、听觉、运动多感官刺激,整合多维度感官刺激构建沉浸式认知交互场景,使脑功能训练能同步调动视觉、听觉、运动及决策相关脑区的激活。该方法旨在解决现有脑机接口技术在人机认知交互应用中无法提供理想身心沉浸感、限制参与者训练任务投入度的问题。

图4 硕士生张连驰进行oral报告并展示学术海报
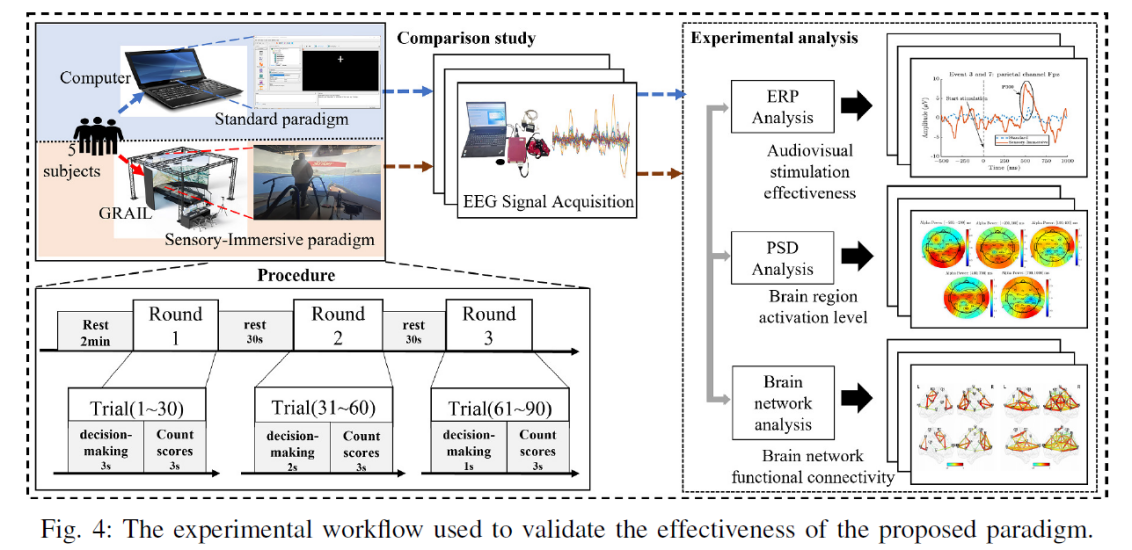
图5 论文二:基于运动全景虚拟现实的感官沉浸式脑机接口决策范式
硕士研究生陈晨作为第一作者发表“A VisuoMotor Human-Robot Interaction Framework for Attention-Motion-Integrated Training”,通讯作者为张静婷讲师。该成果由陈晨在会场以oral报告和poster结合展示(见图6)。该文面向运动与认知联合康复训练场景,提出一种融合视觉注视游戏与力-运动机器人的新型视觉运动人机交互框架(见图7),其中基于动力学系统理论和确定学习提出了一种注意力-运动层级耦合行为的动态模式识别方案,可以实时识别人体注意力与运动行为状态,使训练机器人能动态调整参数,实现注意力与运动功能的协同训练。该方法旨在解决现有机器人训练方法未妥善处理人机认知交互中人的注意力与对运动执行之间的时空耦合关系,导致认知与运动训练的协同性不足问题。
图6 硕士生陈晨进行oral报告并展示学术海报
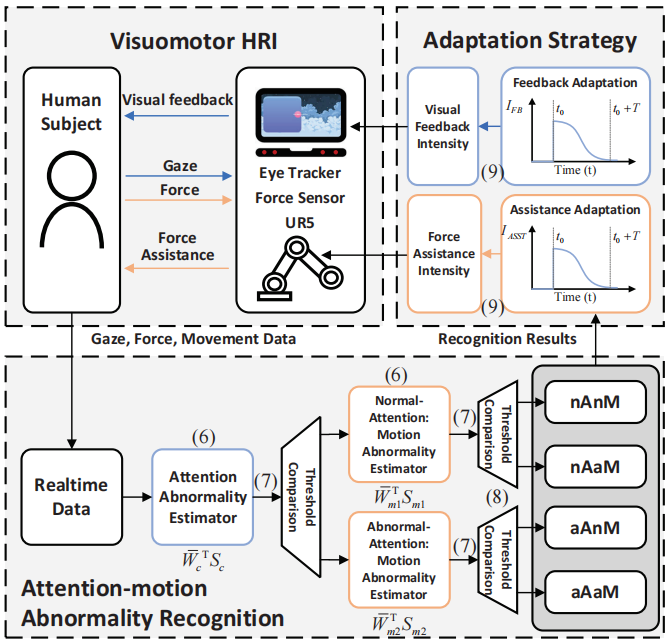
图7 论文三:注意力-运动层级耦合的视觉运动人机交互框架
IEEE 机器人与自动化学会(The IEEE Robotics and Automation Society,IEEE RAS)与日本机器人学会(The Robotics Society of Japan,RSJ)联合发起的 IEEE/RSJ 智能机器人与系统国际会议(IEEE/RSJ International Conference on Intelligent Robots and Systems,IEEE/RSJ IROS),是全球机器人领域两大顶级会议之一,代表该领域前沿技术方向。2025年10月19日至25日,IROS时隔近二十载重返中国大陆,在杭州举办,以“人机协作前沿”为核心议题,聚焦具身智能、大模型与机器人融合等方向。此次会议吸引全球60多个国家和地区的7700余名专家学者、企业代表参会,收到5083篇投稿,录用率约46%,还迎来近200家厂商参展,展览规模创历史之最。会议设置技术分会、专题研讨会、样机展览、技术竞赛等环节,新增创业论坛促进产学研对接,为全球机器人领域学术交流与产业合作搭建核心平台。
上述工作依托人机智能技术与系统教育部工程研究中心,中心负责人为机械与电气工程学院院长程洪教授。该团队目前在康复脑机接口、康复外骨骼、人机交互训练、人机协作机器人等方面有成熟的技术基础和丰富的实践经验,所突破的关键技术均具有完全自主的知识产权。《物理紧耦合人机系统关键技术及其应用》项目在2017年荣获中国人工智能学会“吴文俊人工智能科技进步一等奖”,所研制的下肢助行外骨骼机器人于2018年取得国内首批CFDA注册证,填补了国内产品空白,打破了国际技术壁垒,已达国际先进水平。此外,中心研制的移动机器人和人机共驾系列产品,在国内相关领域产生示范应用,达到国内领先水平。中心目前建有省级平台5个,校企平台2个以及行业联盟3个。已发表与录用论文合计300余篇,申请国家发明专利300项,其中授权150项,30项已转化并实现产业应用。此外,中心承担及完成了包含国家973计划项目、国家重点研发计划在内的国家级重点项目10余项,省部级重点项目20余项。
编辑:罗莎 / 审核:李果 / 发布:陈伟

